20251ROB4 : Waiter Robot

Brief Description & Functionality
The Waiter robot will be designed to work in a restaurant. This robot will move to all tables in the area and check for the customers and plates on the table, then wait for the customers to put the plates in the tray mounted on the robot. Once the plates are kept the robot moves to the next table and at the end takes the tray to the kitchen.
The Waiter Robot is equipped with a LiDAR sensor and RGB-D cameras, which enable it to map its surroundings and localize itself within the environment. Using SLAM (Simultaneous Localization and Mapping), the robot will generate a map of the restaurant and use this map to navigate from table to table.
The robot will be capable of autonomously moving through the restaurant, utilizing its LiDAR sensor to detect obstacles and avoid collisions. It will follow a pre-determined path or respond to real-time tasks like moving to specific tables where the plates are placed.
The robot will detect plates using its RGB-D camera. When it arrives at a table, the robot will use image processing algorithms, powered by OpenCV, to identify that customers have placed their used plates on the tray or not.
Once the plates are placed on the tray, the robot will autonomously navigate to the kitchen or trash area (based on restaurant design), drop off the plates, and then return to its home position.
Reference
Market Survey



Helpful resources
· A book on ROS 2 = Book_ROS2
· ROS Humble Documentation = Ros Humble Tutorials
· Object detection = Object detection tools
Components / Bill of Material
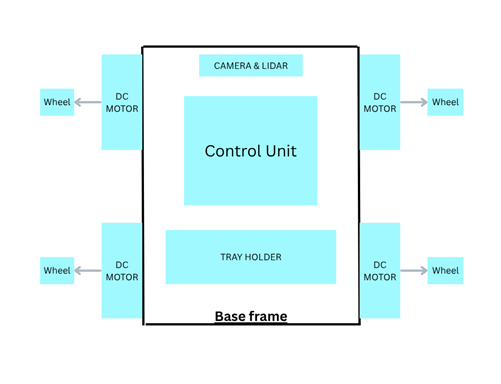
Mechanical Design
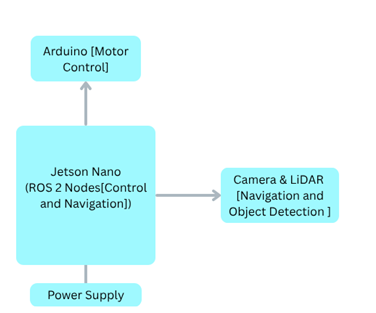
Electronic Design
Skills Required
For JRL7000 students:
- ROS2 Programming
- Manipulation systems
- Control algorithms
- Computer Vision
- Mechanical Design
- Embedded Systems
- Navigation and SLAM