20251GTY4: Autonomous Foosball Project
Brief Introduction & Functionality
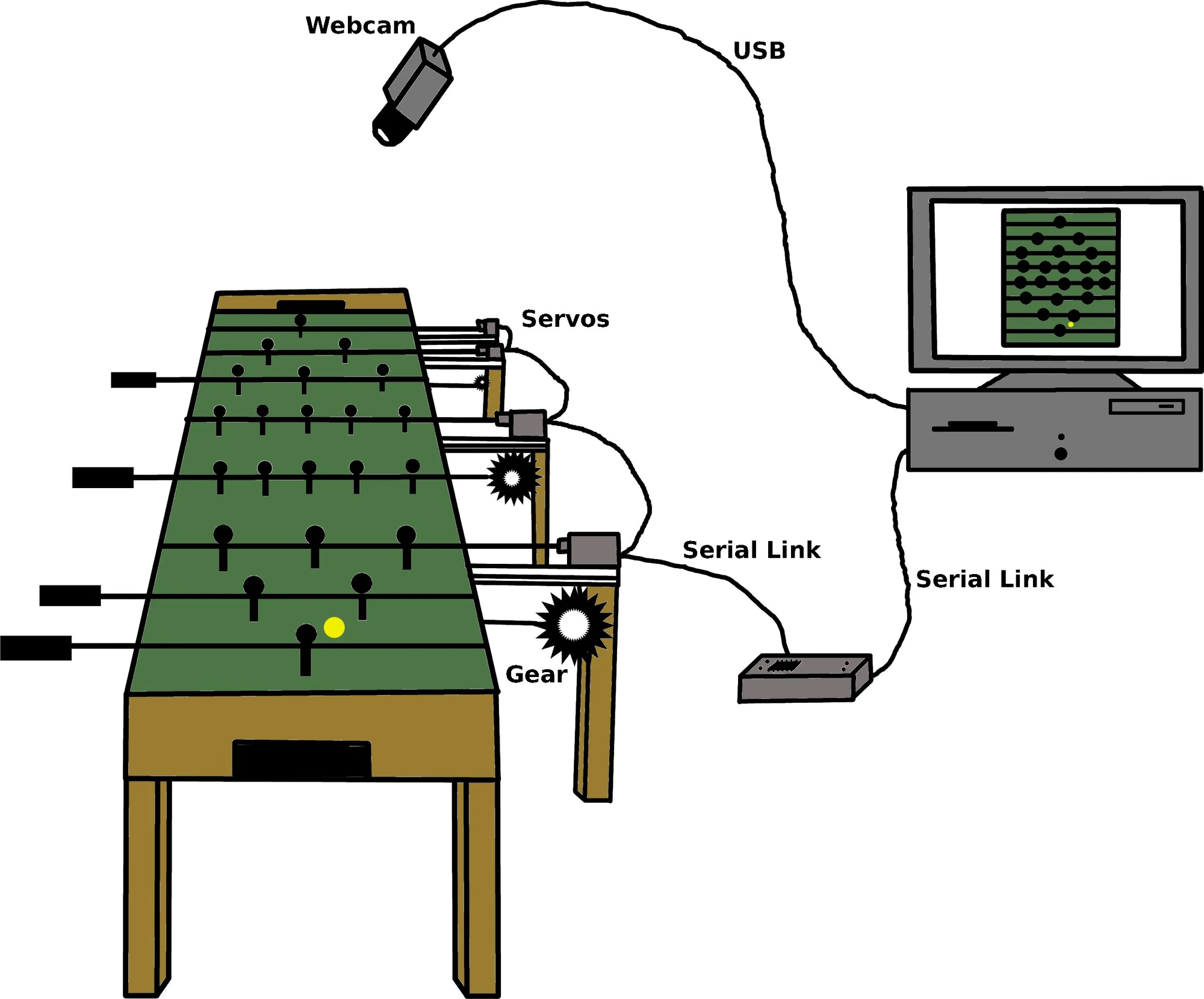
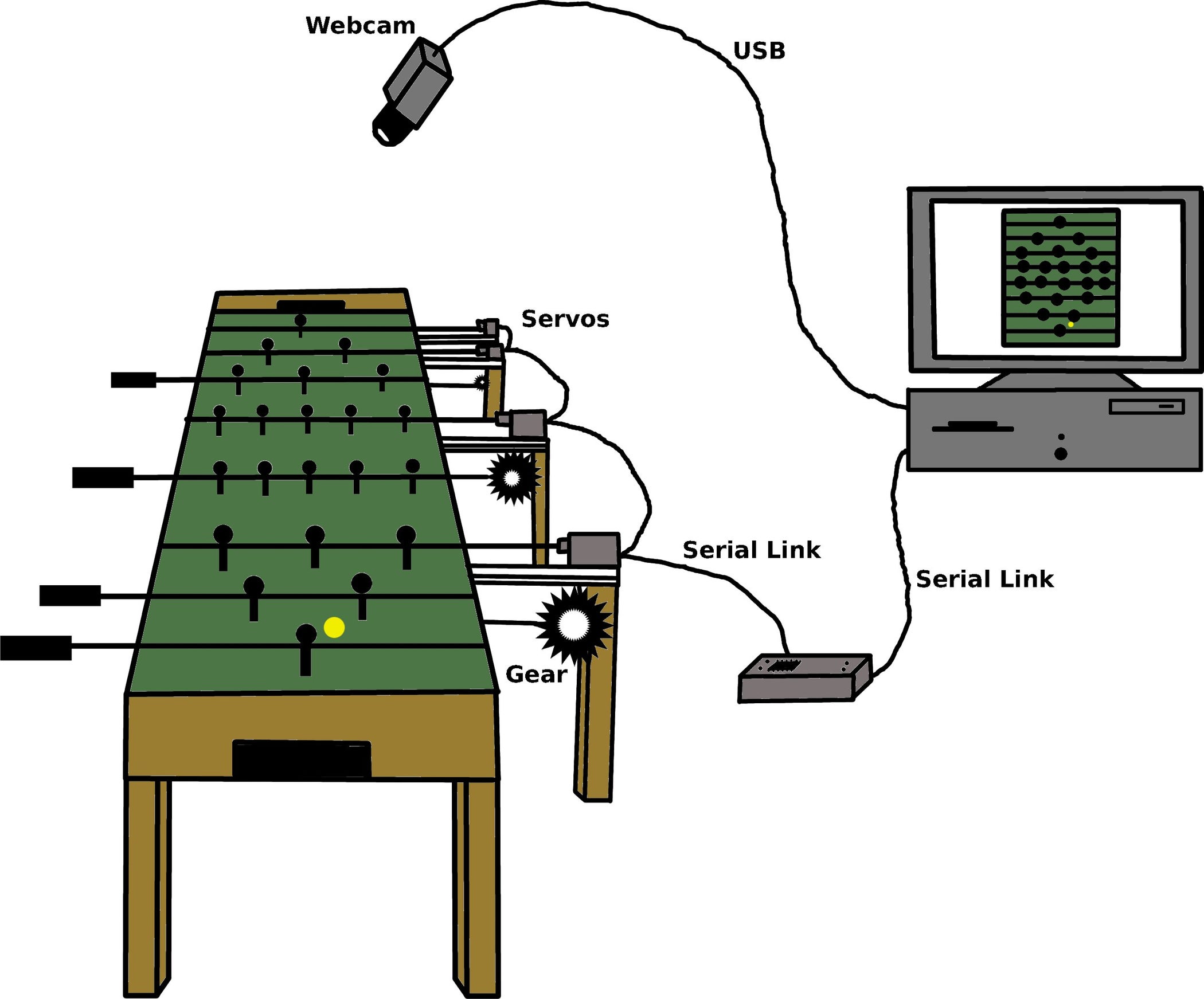
The proposed Autonomous Foosball Table project seeks to transform a standard foosball table into a robotic system capable of playing competitively against a human opponent. Using a combination of motorized actuators, sensors, and intelligent control algorithms, the table automates one side of play, allowing a human player to engage with a robotic adversary. The ultimate goal is to create an interactive, fast-paced environment that leverages real-time ball tracking and automated decision-making.
Core Functionalities:
- Automated Play: One side of the table is powered by motors, enabling linear (left-right) and rotational (spin/kick) movement of each rod.
- Real-Time Ball Tracking: A vision system (such as an overhead camera) detects the foosball's position and velocity in real-time.
- Intelligent Decision Making: A microcontroller or onboard computer processes camera input to track the ball, predict its path, and send precise control signals to the motorized rods to defend, pass, and shoot.
Design Scope
- Conversion of a standard foosball table to support motorized rod movement and automated gameplay.
- Integration of a camera-based vision system for accurate ball detection and trajectory prediction.
- Implementation of a control system capable of real-time actuation and AI-based strategies.
- Optional: Creation of a remote interface or 3D web app for monitoring and controlling the robot.
Tentative List of Components
Mechanical & Fabrication:
- Standard foosball table (base platform)
- Mounting hardware for motors and sensors
- Custom brackets for rod actuation
- 3D printed parts for sensor and component mounts
Electronic Components:
- Brushless DC motors or high-torque servo motors (for linear and rotational movement)
- Motor controllers (compatible with microcontroller)
- Microcontroller (Arduino, Raspberry Pi, or similar)
- Overhead camera (USB or networked webcam)
- Vision system (PC or single-board computer for processing images)
- Power supply (appropriate for motors and controllers)
- Electrical wiring, connectors, and a PCB for system integration
Sensors:
- Overhead camera or stereo vision system for ball tracking
- Optional: limit switches/encoders for rod position feedback
Skills Required
- PCB Design (1 Hr, 100 Pts)
- PCB Milling (2 Hrs, 200 Pts.)
- Manual Soldering (1 Hr, 100 Pts)
- Electronic Testing (1 Hr, 100 Pts)
- Circuit Simulation (1 Hr, 100 Pts)
- 3D Printing FDM (2 Hrs, 200 Pts.)
- 3D Printing SLA (2 Hrs, 200 Pts.)
- Arduino Programming (1 Hr, 100 Pts)
- ESP32 Programming (1 Hr, 100 Pts)
- Computer Aided Design (CAD) (2 Hrs, 200 Pts.)
- Acrylic sheet cutting (2 Hrs, 200 Pts.)
Market Survey Insights
Autonomous Foosball Table
Autonomous Foosball Table: The main project goal was to complete a working prototype for an Autonomous Foosball Table (AFT), where a human player faces a robotic opponent. From the human perspective of the game, the foosball table is very similar to a regular table. The playe…
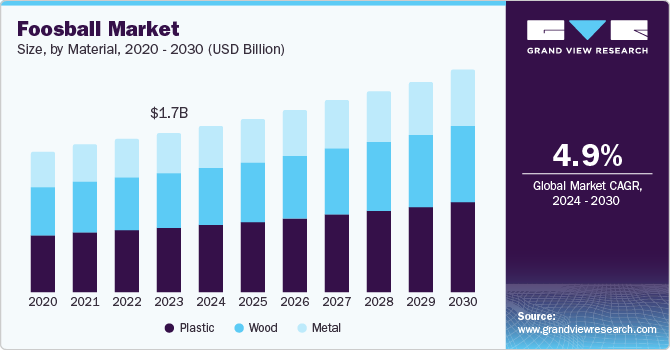
Foosball Table Market Size & Share | Industry Report, 2030
The global foosball table market size was valued at USD 1.74 billion in 2023 and is projected to grow at a CAGR of 4.9% from 2024 to 2030